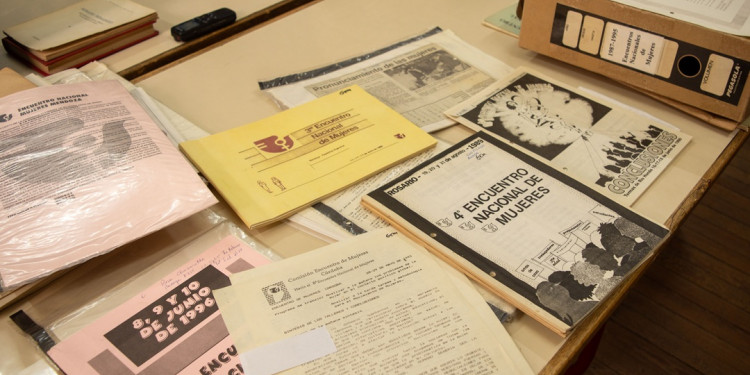
Encuentro de Mujeres, el espacio que desde hace 40 años marca el camino de una agenda de derechos
Las feministas no son disciplinadas, pero cuarenta años de encuentros demuestran que el movimiento ...

23 DE JUNIO DE 2026




La industria en la mira.

Eduardo Iriarte, ingeniero electrónico y director del Instituto de Automática y Electrónica Industrial (IAEI) de la Facultad de Ingeniería de la UNCUYO. Foto: Victoria Gaitán.
Edición U / Rodrigo Armiento
Publicado el 29 DE OCTUBRE DE 2017
Eduardo Enrique Iriarte, de 51 años, es ingeniero electrónico y director del Instituto de Automática y Electrónica Industrial (IAEI) de la Facultad de Ingeniería de la UNCUYO. En colaboración con su amigo Pablo Gustavo Noguera, integrador de sistemas de la empresa NP Integradores, desarrolló un robot innovador en todo el país. Iriarte explica que se trata de un robot paralelo de ejes lineales, con control continuo de trayectoria por DSP mediante protocolo abierto.
Este prototipo, de hecho, ganó dos premios fundamentales a nivel nacional. En 2011 obtuvo el tercer puesto en la categoría Robótica dentro del Concurso Nacional de Innovaciones, pero el batacazo lo dio en 2013, en el concurso Mendoza Innova, en el que el proyecto local se alzó con el primer premio en la categoría Mendoza Emprende. ¿Por qué? Pues tanto Iriarte como Noguera crearon una tecnología sin precedentes en el país y, desde entonces, marcaron un camino a seguir en la robótica industrial.
En la Dirección de Estudios Tecnológicos e Investigaciones (DETI) de la Universidad se encuentra la primera versión del robot paralelo de ejes lineales. Eduardo, encargado de ejecutar el controlador robótico y el software de programación, explicó cómo funciona: “Es capaz de seguir trayectorias con bastante precisión. Está pensado, principalmente, para operaciones que se denominan pick and place (tomar y dejar). Por su capacidad de acelerar puede, por ejemplo, manipular productos a alta velocidad, clasificar, sacar o poner en una cinta, dependiendo del elemento que uno le ponga en el extremo. Puede ser un dosificador de pegamento o una cortadora de plasma, es la operación que podrá realizar. Es decir, es de propósitos generales”.
¿Qué características diferenciaron a este robot de otros proyectos similares?
Lo que lo diferenció en su momento fue el control continuo de trayectoria, el trabajar con controladores industriales y el manejo de coordinación de movimientos mediante un controlador propio (desarrollado por nosotros) que realiza todos los algoritmos de cálculo cinemático. Trabaja con un protocolo de aplicación que se denomina CANopen, que permite manejar con bastante versatilidad el controlador. Otra de las grandes ventajas que posee es que, gracias a que los motores tienen posiciones fijas en la base, consume muy poca energía. Estamos hablando de menos de 500 vatios. A máxima potencia, no creo que esté en más de un kilovatio.
¿Cómo nace este proyecto?
Cuando aquí se estaba iniciando la carrera de Mecatrónica (la carrera se pone en marcha en el año 2001) queríamos invertir en robots de tipo didáctico. En ese entonces le comenté a mi amigo Pablo Noguera sobre dicha búsqueda, y él me dijo: “No, mejor comprate unos ejes industriales y armate un robot”. Y la verdad es que por el mismo precio que salía un robot didáctico, que es casi de juguete, compramos tres ejes industriales con tres motores de calidad y empezamos a trabajar. Hacia el año 2010 detectamos que los movimientos en el modo básico de control de estos equipos (control punto a punto) no cumplían con nuestras expectativas en cuanto a ser un movimiento suave y preciso. Entonces nos planteamos lo siguiente: "No hay más remedio que hacer un movimiento llamado 'interpolado'”. Cuando uno quiere hacer un control coordinado de tres ejes o más, necesita sí o sí el modo interpolado de los servocontroladores, que permite dar posicionamientos precisos a alta velocidad. Nosotros tenemos una consigna de posición de 100 puntos por segundo. Nadie, en la Argentina, había utilizado los servos en modo interpolado.
¿Por qué creés que es importante el desarrollo de estas tecnologías?
La industria puede comprar un robot armado hecho, pero uno tiene allí una tecnología cerrada: no tenés acceso a saber cómo funciona. Además, es carísimo. En cambio, los de desarrollo propio son de arquitectura abierta: lo podés modificar, lo podés adaptar, su costo de mantenimiento es bajo y el soporte está acá, en el país. Entonces, la empresa tiene otro respaldo.
ciencia, iriarte, robot, innovador, ,
Las feministas no son disciplinadas, pero cuarenta años de encuentros demuestran que el movimiento ...
23 DE JUNIO DE 2026

Redes sociales, billeteras virtuales, criptomonedas, correos electrónicos, bibliotecas digitales y ...
23 DE JUNIO DE 2026

Un encuentro que reunió a especialistas y funcionarios provinciales y municipales sirvió para ...
22 DE JUNIO DE 2026